読み込み中...
モーションシミュレーターの事業展開
F 社は,センサーや筐体,機械製品などを対象とした実験・試験装置の設計,製造販売,据付工事を行うメーカーで,動揺や振動を模擬するモーションシミュレーターを主力製品としている。
モーションシミュレーターは,対象品に対し,外部から動きを与える装置である。F 社のモーションシミュレーターは,台を支持する 6 本の電動シリンダを伸縮させることで,台に載せた対象品に対して前後(X 軸),左右(Y 軸),上下(Z 軸)方向の動きと,左右方向の傾き(ロール),前後方向の傾き(ピッチ),左右方向の回転(ヨー)の,空間 6 自由度の動きを自在に作り出す装置である。
F 社のモーションシミュレーターを図 1 に示す。
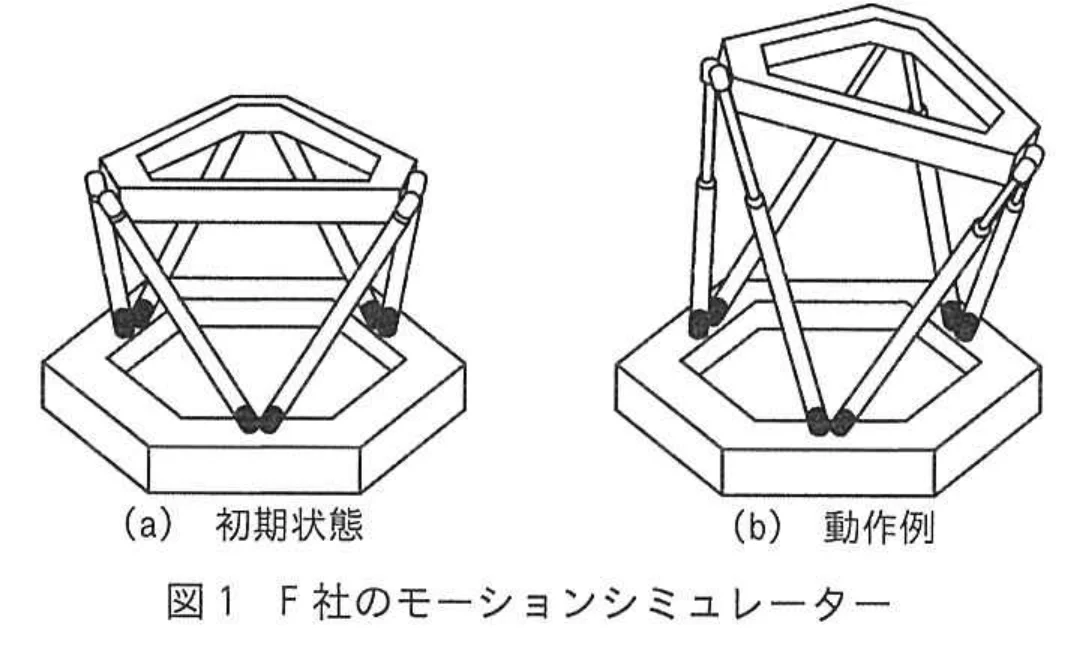
F 社のモーションシミュレーターは,最大搭載質量 500kg の比較的小型の製品であり,ジャイロセンサーや慣性センサーなどの性能計測と校正,及び筐体や機械製品などの強度計測を目的とした実験・試験装置で,設定したシナリオに従って台を動かす機能をもち,自由度と精度の高さで他社に秀でている。
F 社は,今後見込まれる市場の要求を分析して,保有技術を生かした新たな製品を開発して市場に投入することで,より高い業績を目指すことを方針とした。
〔モーションシミュレーターの役割〕
一般的にモーションシミュレーターは,開発用と訓練用に分けられる。開発用のモーションシミュレーターは,性能の検討や設計上のデータを得るために用いられる。ただし,近年は,現実の世界をモデル化し,コンピュータ上でシミュレーションして設計上のデータを得る手法で開発を進めることが多い。空飛ぶクルマなど,今後実現される製品の多くはコンピュータ上のシミュレーションによって開発が進められるものと考えられている。
訓練用のモーションシミュレーターは,実物では技術的又は経済的に困難な条件を何度も自由に再現でき,実物での訓練よりも経済面・安全面で勝るので,航空機の操縦訓練やレーシングドライバーの養成などに活用される例が多い。
航空機の訓練用モーションシミュレーターは,航空機メーカーが重工業メーカーと協業して開発したものが多く,航空機メーカーと重工業メーカーの保有技術に基づいた歴史ある製品となっている。
自動車の訓練用モーションシミュレーターは,一般の運転者向けの製品は例が少ないが,レーシングドライバーやレーシングゲーム愛好者が車の性能を限界まで引き出す運転技術を磨くことを目的とした製品があり,自由度と精度は限定的であるが,運転者が行った操作の体感へのフィードバックなど,車種ごとの性能や特徴を体感できる機能を備えている。
〔市場分析〕
F 社の IT ストラテジストである B 氏は,自社の方針に従い,保有技術が生かせると見込まれる市場を調査した結果,政府が“空の移動革命に向けたロードマップ”を示したことで,2020 年代後半から急速に輸送サービスの拡大が想定される空飛ぶクルマの市場が,F 社の新たな事業領域として有望と考えた。そして,現時点で想定される空飛ぶクルマに期待される構想と活用シーンを調べ,次に示すとおり整理した。(1)空飛ぶクルマに期待される構想
- 2030 年代頃に,操縦者不要な自動操縦も実用化することが想定される。
- 操縦者不要な自動操縦は,専用の離着陸場で離着陸することを前提としている。
- 操縦者不要な自動操縦の実用化までは,操縦支援を受けながら,操縦者の操縦で飛行する必要があり,専用の操縦免許が設定される見込みである。
- 空飛ぶクルマは,機種ごとに操縦方法や性能・特性が異なるので,操縦免許は教習を受けた機種ごとに限定する方向で政府が検討を進めている。
- 操縦者が操縦する空飛ぶクルマには,旅客輸送で操縦者が搭乗して操縦する場合と,荷物輸送で操縦者が遠隔から操縦する場合が想定されている。
- 旅客輸送で操縦者が搭乗して操縦する場合は,空間 6 自由度に対する精度の高い操縦が求められると想定される。
- 荷物輸送で操縦者が遠隔から操縦する場合は,飛行時間の多くを占める巡航を自動操縦にすることを前提に,離着陸時などは 1 人の操縦者で複数の空飛ぶクルマを切り替えながら,視覚情報だけを基に操縦することも想定されている。
- 航続時間 1 時間程度,飛行速度 100km/時程度の性能を想定している。
- 都市内の移動では,地上の道路の混雑に対して,空を飛ぶことによって信号待ちや渋滞を避けることができ,短時間での移動が可能となる。
- 離島や山間地域など,過疎地で公共交通機関を維持できない地域が増えているが,そうした場所でも必要時に容易に過疎地の人の移動が可能となる。
- 災害時・緊急時に,医者や被災者,急病人やけが人,物資などを運ぶ活用シーンも期待されている。
〔要求仕様の定義〕
B 氏は,空飛ぶクルマの訓練用モーションシミュレーターに対する機能・要求を分析し,次のように整理した。
- 視界だけでなく,機体の移動や動揺も体感しながらの訓練ができること
- 操縦者の操縦結果を,視覚情報や空間 6 自由度の動きに加え,操縦桿やペダルなどの操縦装置の反力にもフィードバックすること
- 空飛ぶクルマの機種ごとの性能・特性を再現できること
〔製品技術の分析〕
B 氏は,システムアーキテクトの C 氏に,空飛ぶクルマの訓練用モーションシミュレーターの開発に必要となる技術の分析を依頼した。C 氏は分析結果を次のようにまとめて報告した。
- 視界は AR ゴーグルを用いれば体感させることができる。
- 機体の移動や動揺を体感させるようにするには,実機と同じ操縦席及び操縦装置を F 社のモーションシミュレーターに載せて動かせばよい。
- 空飛ぶクルマの機種ごとの性能・特性を再現するために設計上のデータが必要だが,空飛ぶクルマにモーションシミュレーターで外力を与え,空飛ぶクルマがどのような反応,挙動を示すかを計測して設計上のデータを得ようとすると相当時間が掛かる。
- 操縦者の操縦結果を,視覚情報や移動,動揺に加え,操縦桿やペダルなどの操縦装置の反力に与えるためのフィードバックの制御技術の開発は,F 社では難しい。
〔新製品の検討〕
B 氏は,F 社の新製品として,空飛ぶクルマの開発を進めているメーカーとの協業,及びレーシングゲーム用のモーションシミュレーターを作る国内メーカーとの技術提携を前提として,空飛ぶクルマの操縦訓練をするためのモーションシミュレーターを開発する事業提案を取りまとめた。B 氏は,今後見込まれる市場の要求として操縦訓練をするためのモーションシミュレーター以外に空飛ぶクルマの荷物輸送の遠隔操縦システムもあると分析したが,F 社の保有技術を生かせないと考え新製品の対象から外した。
〔将来の事業展開〕
B 氏は,将来の発展的な製品として,空飛ぶクルマの操縦訓練をするためのモーションシミュレーターに機能を加え,災害時・緊急時を想定した空飛ぶクルマの遠隔操縦の訓練用システムを考えた。B 氏は,災害時・緊急時を想定した空飛ぶクルマの活用における遠隔操縦は,操縦者不要な自動操縦の実用化に至った後も残ると考え,将来の事業展開の方針として,災害時・緊急時を想定した空飛ぶクルマの遠隔操縦の訓練用システムを開発し,販売することにした。また,災害時・緊急時を想定した空飛ぶクルマの遠隔操縦の訓練用システムを販売することで,現在の市場における問題を改善できると考えた。
設問1
〔市場分析〕について答えよ。
(1)
B 氏が,市場分析の結果,空飛ぶクルマの操縦訓練をするためのモーションシミュレーターを新製品として開発することがよいと考えるに至った,F 社主力製品の技術面の特徴は何か。25 字以内で答えよ。
0 / 25字
(2)
B 氏が,空飛ぶクルマを災害時・緊急時を想定したシーンに活用する場合は現在の消防防災ヘリ及びドクターヘリよりも多くの拠点に配備される必要があると考えたのはなぜか。40 字以内で答えよ。
0 / 40字
設問2
〔新製品の検討〕について答えよ。
(1)
B 氏が,F 社の新製品を開発するに当たり,空飛ぶクルマの開発メーカーとの協業を前提とした技術面の目的は何か。20 字以内で答えよ。
0 / 20字
(2)
B 氏が,レーシングゲーム用のモーションシミュレーターを作る国内メーカーとの技術提携を前提とした技術面の理由は何か。35 字以内で答えよ。
0 / 35字
(3)
B 氏が,F 社の保有技術を生かせないと考え新製品の対象から外した理由となる,空飛ぶクルマの荷物輸送の遠隔操縦システムの特徴は何か。25 字以内で答えよ。
0 / 25字
設問3
〔将来の事業展開〕について答えよ。
(1)
B 氏が,災害時・緊急時を想定した空飛ぶクルマの活用における遠隔操縦は,操縦者不要な自動操縦の実用化に至った後も残ると考えたのはなぜか。30 字以内で答えよ。
0 / 30字
(2)
B 氏が,災害時・緊急時を想定した空飛ぶクルマの遠隔操縦の訓練用システムを販売することで改善できると考えた現在の市場における問題は何か。35 字以内で答えよ。
0 / 35字