読み込み中...
IoT, AI を活用した橋梁点検・診断システム
我が国では,高度成長期以降に整備された橋梁,トンネル,河川管理施設など,建設後 50 年以上経過する社会資本の割合が加速度的に高くなってきており,これらの老朽化対策が大きな社会課題となっている。これに対してアセットマネジメントの観点から,限られた財源の下で今ある社会資本をより長期にわたり生かそうという取組が行われるようになってきた。すなわち,従来行われてきた,“壊れてから直す”ではなく,壊れる前に,比較的小さな補修を繰り返すことで,結果的により少ない財源で社会資本の長寿命化を図ろうとする取組である。このような取組においては,効率的,効果的な点検・診断を高い頻度で行うことが極めて重要である。
F 社は,各種センサの活用及び飛行型カメラロボット(以下,カメラロボットという)の活用によって,橋梁の状態を点検・診断するシステム(以下,現行システムという)の開発,実用化を行っている。また,現行システムを活用して,点検・診断作業の受託を行っている。しかし,複雑な構造の橋梁を点検するためには,カメラロボットを手動で操縦する必要があり,熟練操縦者の不足など幾つかの問題がある。F 社では,それらを解決するための新しいシステムの開発を進めている。
(2)撮影後,カメラロボットから SD カードを取り出し,保存されている画像データを診断サーバにアップロードする。
(3)診断サーバに蓄積された画像データを基に,解析を行う技術者が目視で状態の評価を行う。高精細画像からはコンクリート面のひび割れ,鋼材部分の腐食などの評価を,また,赤外線画像からはコンクリート内部の剥離などの評価を行う。
(4)診断サーバに蓄積されたセンサデータから橋梁の振動やたわみなどを算出する。
(5)診断サーバには,これまでの点検で得られたデータや,橋梁の設計図面から作成した橋梁の 3D モデルが蓄積されている。専用ソフトウェアを使用して,(3)及び(4)で得られた診断結果を当該橋梁の 3D モデル上で表示する。
(6)顧客とともに 3D モデル上の診断結果を評価し,補修の必要性や工事内容,優先順位の決定などを行う。
(1)カメラロボットの自律飛行技術の開発
診断サーバに蓄積されている橋梁の 3D モデルを活用することによって,自律飛行を行う複数のカメラロボットによる点検を可能とする。
(2)必要なときだけセンサノードを設置
センサノードを自律飛行で運搬する小型の飛行ロボット(以下,センサロボットという)を開発する。センサノードはセンサロボットによって,橋梁に運搬,設置された後,必要な期間だけセンサデータの収集・送信を行い,センサロボットによって回収される。そのために,センサロボットでセンサノードの設置・回収を可能とするノード設置アダプタを開発し,橋梁に固定設置する。また,センサノードの通信方式をモバイル通信に変更する。
(3)診断の効率化
画像の診断に AI を導入して診断の効率化を図る。また,橋梁の環境データ,診断データ及び設計データを AI で分析,学習することによって,劣化の予測モデルを構築することで予兆診断・保全を可能とする。
(4)アライアンスの成果の活用
現行システムにおける環境データ,画像データ及び設計データは独自のフォーマットで診断サーバに格納されているが,これらをそのまま活用し,かつアライアンスの成果も活用するため,診断サーバ上に変換層を開発し,他社へのデータの提供及び他社のデータの活用を図る。
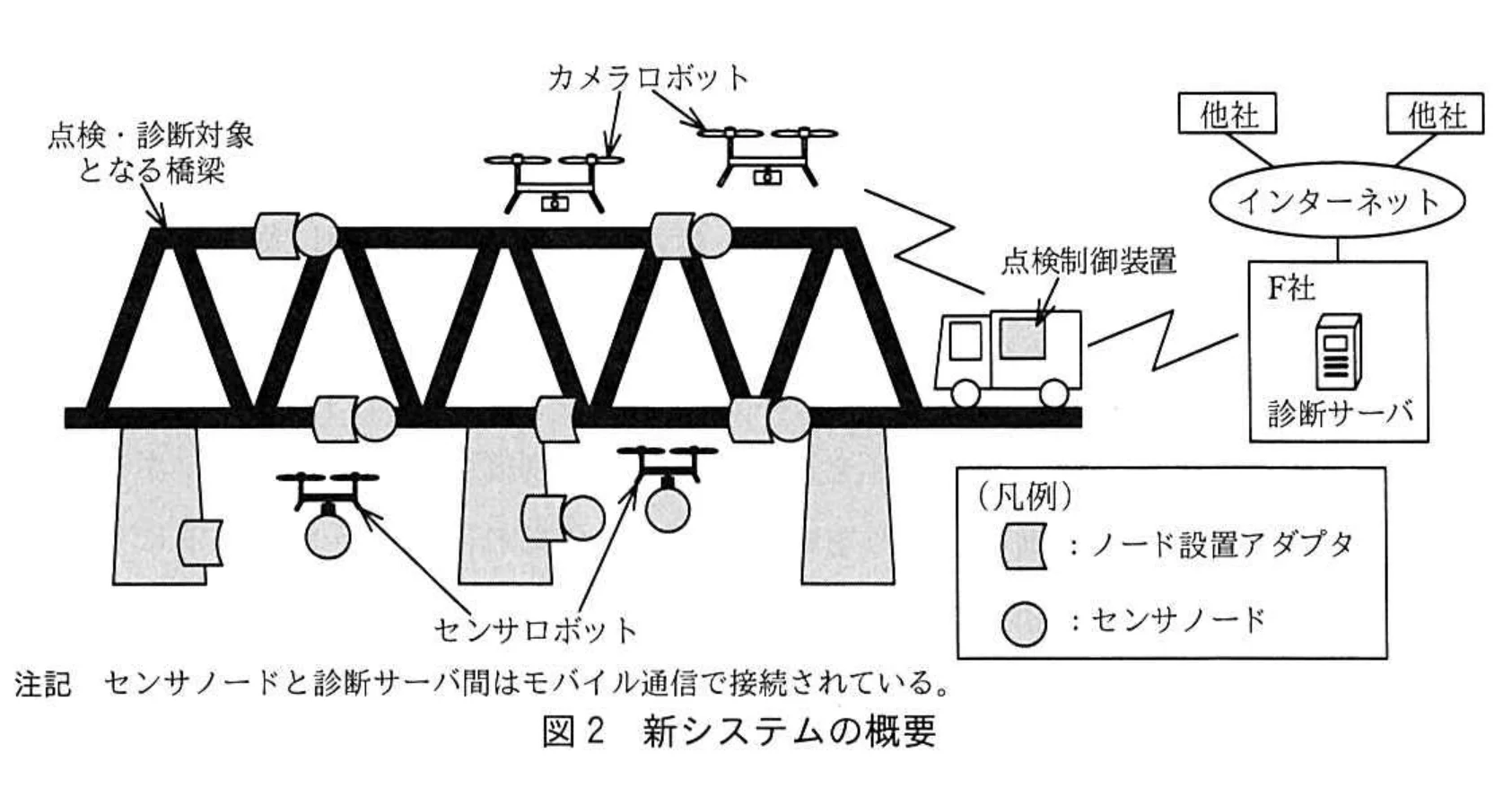
注記 センサノードと診断サーバ間はモバイル通信で接続されている。
F 社は,各種センサの活用及び飛行型カメラロボット(以下,カメラロボットという)の活用によって,橋梁の状態を点検・診断するシステム(以下,現行システムという)の開発,実用化を行っている。また,現行システムを活用して,点検・診断作業の受託を行っている。しかし,複雑な構造の橋梁を点検するためには,カメラロボットを手動で操縦する必要があり,熟練操縦者の不足など幾つかの問題がある。F 社では,それらを解決するための新しいシステムの開発を進めている。
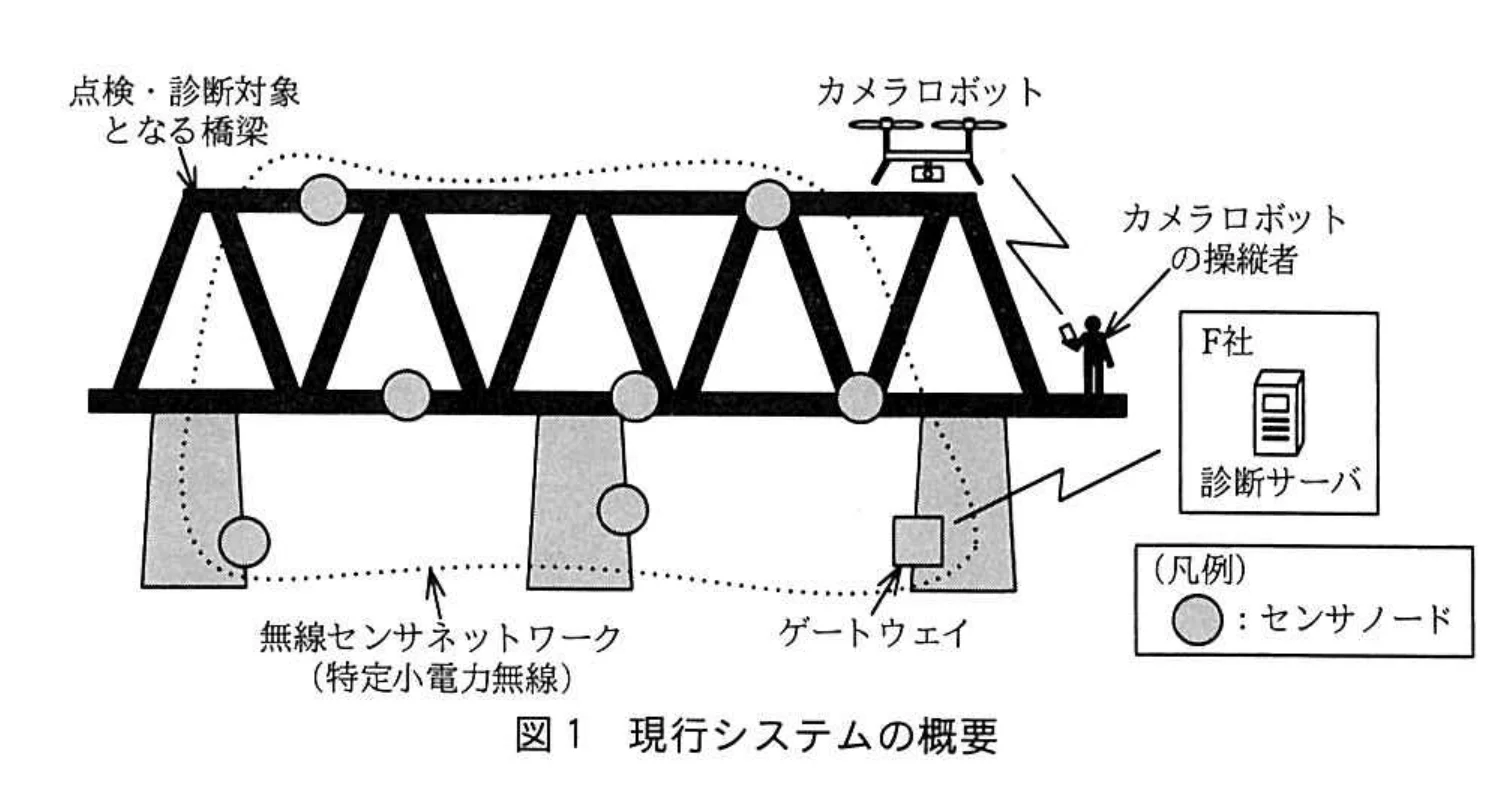
〔現行システムの概要〕
一つの橋梁を点検・診断する際の現行システムの概要を図 1 に,現行システムの構成要素の仕様・機能を表 1 に示す。| 構成要素 | 仕様・機能 |
|---|---|
| センサノード |
|
| ゲートウェイ |
|
| カメラロボット |
|
| 診断サーバ |
|
国や自治体などの顧客から橋梁の点検・診断作業を受託した後,現行システムを使用して行う点検・診断の手順を次に示す。
(1)点検する橋梁について,カメラロボットを操縦しながら,順次橋梁全体の高精細画像及び赤外線画像を撮影する。(2)撮影後,カメラロボットから SD カードを取り出し,保存されている画像データを診断サーバにアップロードする。
(3)診断サーバに蓄積された画像データを基に,解析を行う技術者が目視で状態の評価を行う。高精細画像からはコンクリート面のひび割れ,鋼材部分の腐食などの評価を,また,赤外線画像からはコンクリート内部の剥離などの評価を行う。
(4)診断サーバに蓄積されたセンサデータから橋梁の振動やたわみなどを算出する。
(5)診断サーバには,これまでの点検で得られたデータや,橋梁の設計図面から作成した橋梁の 3D モデルが蓄積されている。専用ソフトウェアを使用して,(3)及び(4)で得られた診断結果を当該橋梁の 3D モデル上で表示する。
(6)顧客とともに 3D モデル上の診断結果を評価し,補修の必要性や工事内容,優先順位の決定などを行う。
〔現行システムの問題点〕
現行システムの問題点を次に示す。
- 手動でカメラロボットを操縦するが,操縦に熟練を要するので,複数のカメラロボットを用いた同時点検を行おうとする場合,操縦者の数がネックになりやすく,大規模な橋梁や複数の橋梁の点検には時間が掛かる。
- センサノードは固定式で,使い捨ての電池で駆動するので,電池交換及びそれに伴う設置工事などの保守コストが増大している。また,ゲートウェイは商用電源を使用する必要があるので,設置できる橋梁が限られてしまう。
- 撮影した画像から目視で評価を行うので,全画像を診断するまでに時間が掛かり,かつ見落としも発生している。また,センサからたわみや振動のデータ以外に様々なデータを取得しているが,それらが十分に活用されていない。
〔新たなシステムにおける取組方針と開発項目〕
F 社では,これらの問題を解決するために,橋梁の状態の点検・診断を行う新たなシステム(以下,新システムという)を開発することになり,その取組方針を次のようにまとめた。
- カメラロボットの自律飛行技術を開発し,操縦者なしでも点検を可能とする。また,一つの橋梁に対して,複数のカメラロボットでの同時点検を可能とする。
- 必要なときだけ,センサノードを設置し,必要なセンサデータが取得できたらセンサノードを低コストで回収可能な方式を検討する。
- 画像データから,ひび割れ,剥離,腐食などの診断データを自動的に得られるようにして,画像の診断の効率化を図る。
- センサで収集した橋梁の環境を示すデータ(以下,環境データという),カメラロボットで収集した画像データ,画像データから得られた診断データ,及び橋梁の構造や材質などの設計データの相関関係を時系列に分析し,補修や対策が必要な状況のより早い検知を可能とする。
- F 社は,環境データ,画像データ及び設計データを業界横断的に共有,活用できるようにするため,各データのデータモデルの標準化,及び標準化されたデータモデルを提供するための API の標準化を目的として,業界内でアライアンスを推進してきた。新システムではその成果を最大限活用する。
(1)カメラロボットの自律飛行技術の開発
診断サーバに蓄積されている橋梁の 3D モデルを活用することによって,自律飛行を行う複数のカメラロボットによる点検を可能とする。
(2)必要なときだけセンサノードを設置
センサノードを自律飛行で運搬する小型の飛行ロボット(以下,センサロボットという)を開発する。センサノードはセンサロボットによって,橋梁に運搬,設置された後,必要な期間だけセンサデータの収集・送信を行い,センサロボットによって回収される。そのために,センサロボットでセンサノードの設置・回収を可能とするノード設置アダプタを開発し,橋梁に固定設置する。また,センサノードの通信方式をモバイル通信に変更する。
(3)診断の効率化
画像の診断に AI を導入して診断の効率化を図る。また,橋梁の環境データ,診断データ及び設計データを AI で分析,学習することによって,劣化の予測モデルを構築することで予兆診断・保全を可能とする。
(4)アライアンスの成果の活用
現行システムにおける環境データ,画像データ及び設計データは独自のフォーマットで診断サーバに格納されているが,これらをそのまま活用し,かつアライアンスの成果も活用するため,診断サーバ上に変換層を開発し,他社へのデータの提供及び他社のデータの活用を図る。
〔新システムの概要〕
G 氏は,各開発項目について検討し,新システムの概要を図 2,新システムの構成要素の仕様・機能を表 2 のようにまとめた。注記 センサノードと診断サーバ間はモバイル通信で接続されている。
| 構成要素 | 仕様・機能 |
|---|---|
| センサノード |
|
| カメラロボット |
|
| 点検制御装置 |
|
| センサロボット |
|
| ノード設置アダプタ |
|
| 診断サーバ |
|
G 氏は,カメラロボットによる点検手順を次のようにまとめた。
(1)橋梁の 3D モデル上で,点検を行うカメラロボットに設定する飛行計画を生成して点検前にカメラロボット及び点検制御装置に設定する。
(2)点検時は,次の手順で自律的に点検を実施する。
- 点検を開始すると,カメラロボットは設定された飛行計画に従い,自律飛行を開始する。
- 飛行中,各カメラロボットは点検制御装置に対して,常に自機の GNSS 位置,高度,姿勢,電池残量などを通知する。点検制御装置は各カメラロボットに設定された飛行計画とのずれを監視し,必要であればカメラロボットに対して飛行計画の修正を指示する。
- 点検制御装置は,飛行計画とのずれが許容範囲を超えた場合や,カメラロボットの姿勢制御が困難になった場合など,点検の継続が困難と判断される場合に,全カメラロボットに中断を指示し,指定した地点に着陸させる。
設問1
新システムについて,(1)〜(3)に答えよ。
(1)
表 2 中の a に入れる適切な字句を答えよ。
(2)
センサノードの通信方式をモバイル通信にした目的を 20 字以内で述べよ。
0 / 20字
(3)
センサロボットの導入によって,センサノードの運用面での改善を図ることができる。コストの削減以外にどのような改善が図れるか。25 字以内で述べよ。
0 / 25字
設問2
新システムでのカメラロボットの仕様及び運用について,(1),(2)に答えよ。
(1)
カメラロボットが自律飛行を行うために全方位近接センサを用いる。全方位近接センサが障害物を検出した場合に,カメラロボットはどのような飛行を行うか。25 字以内で述べよ。
0 / 25字
(2)
点検制御装置がカメラロボットの運用を安定的に行うために,風向・風力計のデータを活用したい。診断サーバに蓄積されているデータを使用する場合の問題点を 40 字以内,その解決策を 35 字以内で述べよ。
0 / 40字
0 / 35字
設問3
診断の効率化のための施策について,(1),(2)に答えよ。
(1)
予兆診断・保全を可能とするため,F 社が点検・診断した橋梁を分析するだけでなく,業界横断でのデータ共有が必要な理由を 40 字以内で述べよ。
0 / 40字
(2)
表 2 中の診断サーバの仕様・機能において,新システムで開発する変換層の役割を 40 字以内で述べよ。
0 / 40字