読み込み中...
IoT, AIを活用した消火ロボットシステム
F社は, 消防署・消防団などの消防活動で使用する機材・システムの開発・製造を行っている。
石油・化学プラントなどの産業施設では, 消防活動における課題がある。例えば, 貯蔵する物質によっては消火に泡を用いるなど, 消火方法が異なる場合があるほか, 高熱, 爆発の危険性によって消防士が近づくことができない場合もある。そのような大規模・特殊火災に対応した機材・システムへの期待が大きい。
F社は, 大規模・特殊火災に対応できる高い放射熱に耐え, 無人で消火活動を行う消火ロボットシステム(以下, 現行システムという)を実用化している。しかし, 放水を行う位置(以下, 放水位置という), 放水した水が到達する位置(以下, 注水位置という)が適切でないなどの問題があり, F社では, それらを解決するための新しいシステムの開発を進めている。
〔現行システムの概要〕
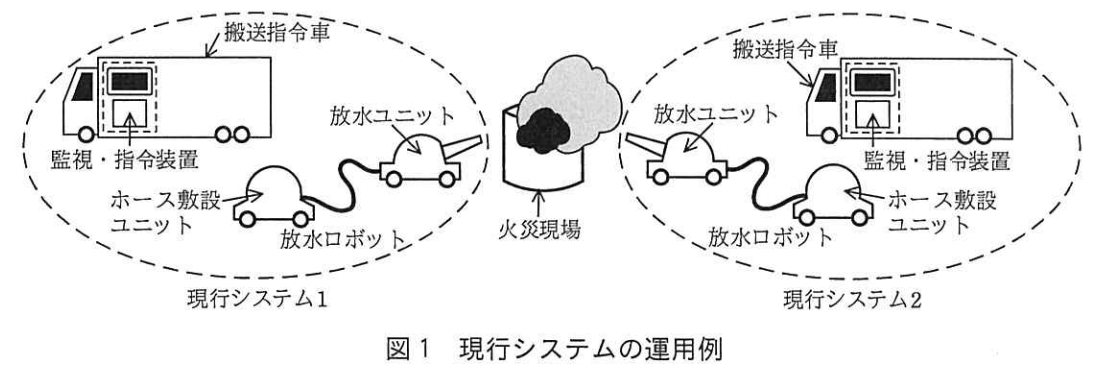
F社の現行システムは, 監視・指令装置を備えた搬送指令車及び放水ロボットで構成される。放水ロボットは放水ユニットとホース敷設ユニットで構成される。現行システムは単体又は複数で運用する。現行システムの運用例を図1に, 現行システムの仕様・機能を表1に示す。
| 項目 | 仕様・機能 | 搭載機器・センサなど |
|---|---|---|
| 放水ロボット |
|
|
| ||
| ||
| 搬送指令車 |
|
|
| 監視・指令装置 |
|
|
放水ロボットは, 耐熱性能に優れており, 消防士だけで消火活動よりも高い放射熱の環境下で活動できる。放水を開始するまでの手順を次に示す。
① 搬送指令車が火災現場に到着後, 消防士は, 放水ロボットを搬送指令車から降ろす。消防士は, 放水ロボットに放水位置を指令し, 自律走行を開始させる。
② 放水ユニットは障害物を避けながら放水位置まで走行する。ホース敷設ユニットは放水ユニットに追従して走行する。
③ 放水ロボットが放水位置に到着後, 消防士は消火栓などの水源の位置をホース敷設ユニットに指令する。ホース敷設ユニットは, 延長用消防ホースを敷設しながら水源まで自律走行する。
④ 消防士は, ホース敷設ユニットと水源を接続した後, 搬送指令車から放水ユニットの放水ノズルを遠隔で操作し, 放水した水が目標とする位置(以下, 注水目標という)に到達するように放水ノズルの方位・仰角を設定し, 放水を開始する。放水中, 消防士は, 注水位置が適切になるように放水ノズルを操作する。
〔現行システムの問題点〕
現行システムの問題点を次に示す。
- 消防士が搬送指令車に搭乗し, 監視しながら放水ロボットへの指令と操作を行う。複数の現行システムを運用する場合, 全体を指揮する消防士は放水ロボットを操作する消防士に放水位置などを指示するが, “迅速性に欠ける”, “放水位置が適切でない”という問題がある。
- 自律走行している放水ロボットの走行ルート上に障害物がある場合, 障害物を回避する走行ルートを放水ロボット自体で探索する必要がある。
- 消防士は放水ノズルを遠隔で操作しているが, 上空の風向及び風速が地表と異なり, 注水位置と注水目標がずれる場合がある。また, 地上から観測できない場所に対して注水目標を適切に設定できない。
〔新たなシステムにおける取組方針と開発目標〕
F社では, 現行システムの問題を解決するために, 新たな消火ロボットシステム(以下, NFR システムという)を開発することになり, システムアーキテクトである G 氏が開発目標をまとめた。NFR システムについての F 社の取組方針と G 氏が設定した開発目標は, 次のとおりである。
(1) 火災現場全体の状況把握, 放水位置・注水目標の設定, 放水ロボットの走行ルートの探索などに必要なデータの取得を迅速かつ確実に行えるようにする。
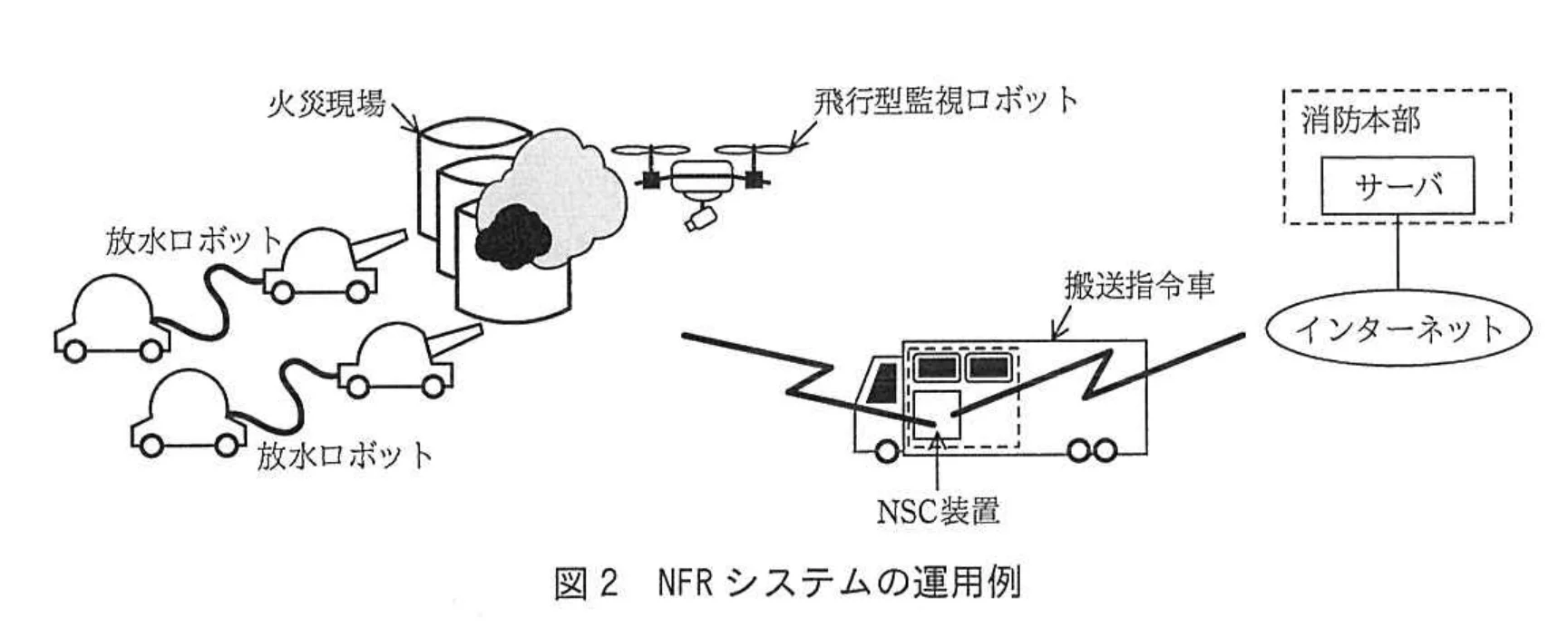
このために, 耐熱性を備え, 火災現場の上空を無人で自律飛行できる監視ロボット(以下, 飛行型監視ロボットという)を開発する。
(2) 飛行型監視ロボットが取得したデータなどを用い, 放水位置, 注水目標及び放水ロボットの走行ルートを, 消防士が介在せずに放水ロボットに指令できるようにする。さらに, 火災現場で稼働中の全てのロボットに対して, 搬送指令車 1 台だけで監視・指令が行えるようにする。
このために, 稼働中の全てのロボットと無線で通信し, 各ロボットからのデータを収集, 処理し, 監視用表示モニタに表示するとともに, 各ロボットに指令を送信できる新たな監視・指令装置(以下, NSC 装置という)を開発する。
(3) 複数の放水ロボットが連携して消火活動を行えるようにする。
複数の放水ロボットを同時に運用する場合, NSC 装置からの指令によって, 全ての放水ロボットが連携して消火活動を行えるようにする。
(4) 効果的な消火活動を目指す。
飛行型監視ロボットが取得したデータと, 消防本部のサーバが保有する消火対象施設の情報とを AI 技術で処理することによって, 火災の状況を分析し, 適切な放水位置, 注水目標を各放水ロボットに指令する。また, 飛行型監視ロボットが取得したデータを活用し, 注水位置と注水目標のずれを補正して, 効果的な消火活動が行えるようにする。
(5) 最適な放水制御の実現と故障の予兆診断による稼働率の改善を目指す。
各ロボットの稼働中のデータを収集, 蓄積し, AI 技術を用いて, 放水制御の最適化及び稼働率の改善を図るようにする。
〔NFR システムの概要〕
G 氏は, 設定した開発目標について検討し, NFR システムの概要をまとめた。NFR システムの運用例を図 2 に, NFR システムの仕様・機能を表 2 に示す。
| 項目 | 仕様・機能 | 搭載機器・センサなど |
|---|---|---|
| 放水ロボット |
|
|
| 飛行型監視ロボット |
|
|
| 搬送指令車 |
|
|
| NSC 装置 |
|
|
G 氏は, NFR システムによる消火活動の手順, 各ロボットの運用などを次のようにまとめた。
① 搬送指令車が火災現場に到着後, すぐに, 消防本部のサーバが保有する情報を NSC 装置にダウンロードするとともに, 飛行型監視ロボットを飛行させて監視データを取得させる。NSC 装置は, その監視データを受信し, データ処理を行い, 適切な, 放水位置, 注水目標, 水源などを決定し, 放水ロボットに指令を送信する。
なお, 飛行型監視ロボットは, 複数機を順次運用する。ただし, 火災現場では, 複数機を同時に飛行させる監視は行わない。
② NSC 装置は, 飛行型監視ロボットが取得した障害物の位置情報を基に, 放水位置までの走行ルートを決定し, 放水ロボットに送信する。
③ 放水ロボットは, 放水位置に向けて走行を開始する。
④ 放水ロボットが放水位置に到着後, NSC 装置は水源までの走行ルートを決定し, ホース敷設ユニットに指令する。ホース敷設ユニットは, 延長用消防ホースを敷設しながら水源まで自律走行する。ホース敷設ユニットと水源が接続されると, NSC 装置は, 注水目標への放水の開始を放水ユニットに指令する。
⑤ NSC 装置は, 飛行型監視ロボットのカメラで撮影された映像を処理し, 上空の風向及び風速, 注水目標とその周辺の温度変化などを基に, 注水位置と注水目標のずれを補正すべきか, 又は注水目標を変更すべきかを判断し, 放水している放水ロボットの放水ノズルの方位・仰角を調整する。
⑥ 放水ロボットが放水している間, NSC 装置は a 及び放水ロボットに指令を送信し, ⑤の制御を繰り返す。複数の放水ロボットを運用する場合は, ①〜⑤の指令・制御を各ロボットに順次行う。NSC 装置は, これらの指令のデータと処理に用いたデータとをリンクさせ, 消防本部のサーバに送信して蓄積する。
〔消防本部のサーバに蓄積されたデータの活用〕
消防本部のサーバに蓄積されたデータの活用方法を次に示す。
- 大規模・特殊火災のリスクがある施設及びその周辺の情報を平時からサーバに収集しておき, 火災発生時に活用できるようにする。NSC 装置は, サーバにある消火対象施設の構造図を用いて, 適切な b を設定できる。
- サーバに蓄積されたデータを AI 技術で処理し, NSC 装置及び放水ロボットの制御の迅速化, 最適化を図るとともに, 稼働管理の自動化, 高度化を進める。
設問1
消火ロボットシステムについて, (1)〜(3)に答えよ。
(1)
本文中の a , b に入れる適切な字句を答えよ。
(2)
複数の放水ロボットの運用について, 現行システムと比較して NFR システムで大きく変わり, 改善できることは何か。35字以内で一つ述べよ。
0 / 35字
(3)
消防本部のサーバが保有する消火対象施設の情報として, 構造図, 危険物の種類と量などがある。これらの情報を活用する目的は何か。15字以内で答えよ。
0 / 15字
設問2
飛行型監視ロボットについて, (1)〜(3)に答えよ。
(1)
NSC 装置は, 消防本部のサーバが保有する消火対象施設の情報を用いて, 障害物を回避させながら飛行型監視ロボットを飛行させている。このとき, 飛行ルートの安全性を確保するために, 更に必要となる情報は何か。25字以内で具体的に述べよ。
0 / 25字
(2)
消防本部のサーバが保有する情報と飛行型監視ロボットが取得したデータとを AI 技術で処理することで期待できることは何か。30字以内で述べよ。
0 / 30字
(3)
自律飛行による監視を継続しているとき, 火災状況の変化を見落とさないようにするには, どのように飛行させるべきか。30字以内で述べよ。
0 / 30字
設問3
NSC 装置の利用について, (1), (2)に答えよ。
(1)
各ロボットのセンサから得られたデータと指令のためのデータを消防本部のサーバに蓄積している。サーバに蓄積されたデータを処理するとき, センサから得られたデータと指令のためのデータを対応させるために必要な情報は何か。二つ答えよ。
(2)
複数の放水ロボットを運用する場合, 各放水ロボットの放水位置を定め, それぞれの水源を決定する。このとき, どのようなことを考慮しなければならないか。40字以内で述べよ。
0 / 40字